
小惑星のような極小重力下の環境では歩行による移動は困難、タイヤによる走行も困難。
果たしてどうやって移動したら良いのだろう?
そんな課題を解決するためのロボットの研究にNASAは近年テクノロジーレディネスレベル(TRL)3.5で資金提供を行っています。※3.5はコンセプトの実証からラボでの検証
詳しい情報がないのですが、何十億円規模の予算みたいです。
そこでトップ画像の立方体ロボットが現在注目を集めています。
スイス発のキュブリ
実はこれ、チューリッヒ工科大学から鮮やかな登場をした不思議な立方体ロボット、キュブリ (the Cubli)がモデルになっているようです。
あまりにも静動な動きのために美しいとさえ思えてしまう立方体キュブリ
仕組みはモーターを高速で回転させて、中のフライホイールでバランス維持や起き上がりの動作を行っています。
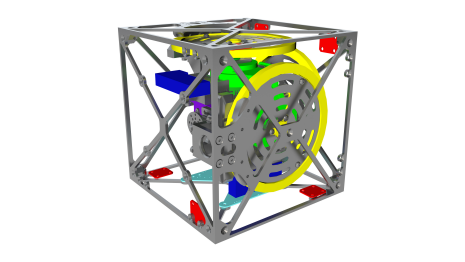
回転させたものを急に止める反動で動いているんですね。かっこいい。
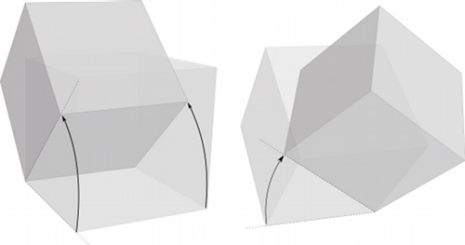
そんな立方体ロボットが実は小惑星調査に向いているんだそうな
大きな穴などが空いていると普通のロボットだと抜け出せなくなってしまうところ、立方体ロボットなら抜け出しやすいみたいです。動画の1:40あたりから実際の実験動画があります。
実際の惑星などに似た地形でのテスト動画
なんだかコロコロしてて可愛いですね。
現在はZero-G飛行機の擬似無重力空間などでテストを行っているそうです。
ちなみに東京ビックサイトで開催中の国際ロボット展(12月2〜5日)でもマクソンモーター社による同様のロボットが展示されています。
実際にお目にかかりたい方はお早めに!