ビールって常に飲みたいですよね。
いつも手元に置いておきたいアイテムNo.1です。
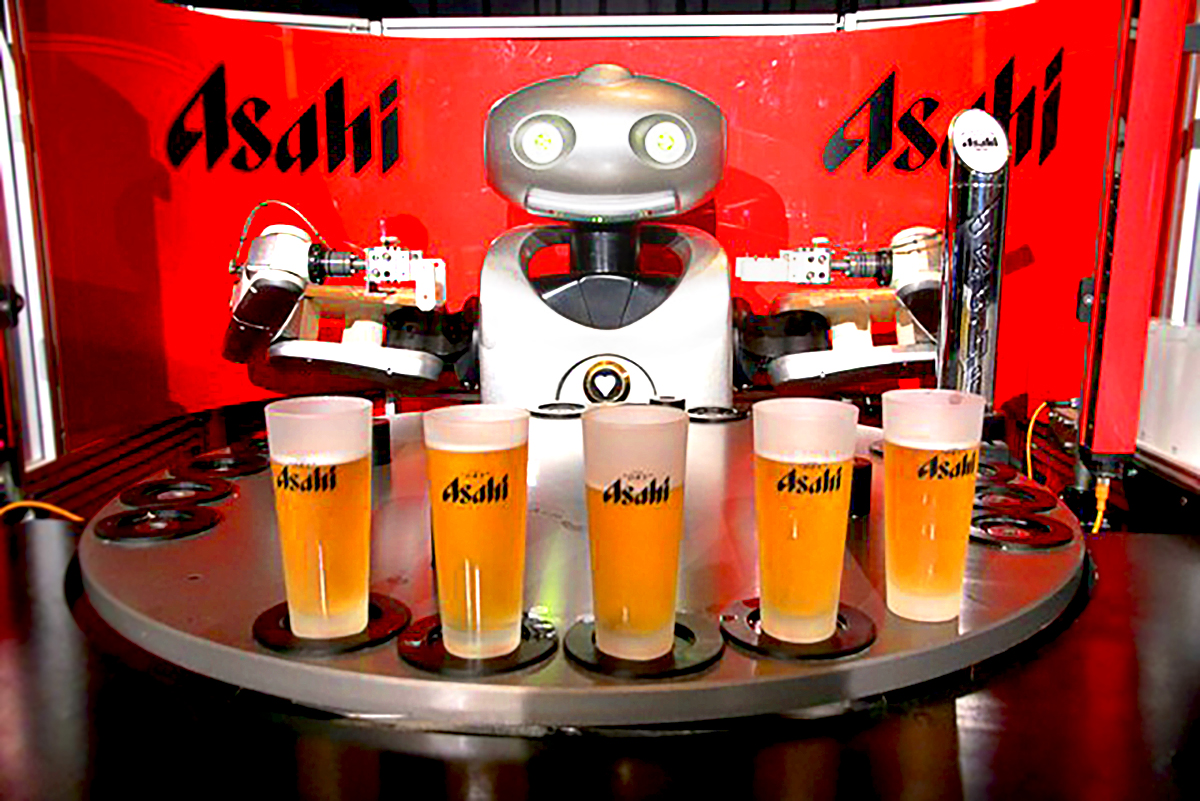
ニューハンプシャー大学、デューク大学、そしてMITの共同プロジェクトで、欲しい時にビールを持ってきてくれるロボットが開発されました。
“Do you want to order a drink” 「お飲み物はいかがですか?」
と聞いてくるのに返事は押しボタン方式という時間がなかったことがすぐにわかる素晴らしい仕様です。やっぱりシンプル · イズ · ザ · ベストです。小難しいことすると世界中のエンジニア“KISS”と言われてしまいますもの。 (Keep It Simple, Stupid, “シンプルにしておけよ、この間抜け”の意)
活用されているロボットは東大の研究室にもいるお馴染みのPR2:
参考記事: ロボはとりあえず全部購入するらしい、東京大学の研究室に行ってきたよ〜

そしてこちらもROSでの入門機としてお馴染みのタートルボット

プロジェクトの目的はロボットにできる限り独立性を持たせて、マクロアクションと呼ばれるロボットの個別行動+判断に基づいた集団行動決定のようです。 既存のフレームワークでは2体のロボットで完璧に作業をできるようにプログラムしていても、もう1体加えるだけで全く仕事ができなくなってしまうという問題点を解決するために考えたそうな。
タートルボットはお互いに至近距離になるまで通信ができない状態になっているため、PR2にビール缶を支給してもらうタイミングが被ってしまった場合、彼らは個別に行動決定をしなくてはなりません。
人間でもありますよね、お互いにゆずりあってしまう変な状況。
「俺が行くよ!」
「いや、俺が行くよ!」
「俺が!」「俺が!」…..
「じゃあ俺が行くよ!」
「どうぞ、どうぞ!」
やっていることは簡単そうに見えて、何気に難しそうな感じですね。
それよりも…動画でプロジェクトの説明している女性。
あ…あれ?
よく見ると…
MITのアリエルさんじゃないですか!!!

以下の記事で登場した方です↓
: マサチューセッツ工科大学でロボット研究してる3人だけど何か質問ある?
当たり前ですが、このプロジェクトもちゃんと論文になっていました。
Policy Search for Multi-Robot Coordination under Uncertainty:
http://www.roboticsproceedings.org/rss11/p07.pdf
ジュラシックワールドのパロディーとかもしてます。


彼女にも引き続き注目していきたいですね!